Project Details
Detailed information about our robotics and AI research projects. Discover the technical specifications, methodologies, and outcomes of our innovative work in intelligent machines.

Vision-based Robotic Manipulation
Date: 2022
Technologies: ROS Computer Vision Deep RL Python
This project focuses on developing intelligent robot control systems that can perceive their environment through computer vision and make decisions based on visual inputs. Using deep reinforcement learning techniques, the robot is trained to recognize objects, grasp them correctly, and manipulate them to perform specific tasks.

ROS Interface for Industrial Robot
Date: 2023
Technologies: ROS C++ Industrial Robotics MODBUS
Development of a comprehensive ROS interface for industrial robot control and monitoring. This project enables seamless integration of industrial robots with ROS ecosystem, providing real-time control, sensor data acquisition, and safety monitoring capabilities for manufacturing applications.

Humanoid Kinematic Model
Date: 2021
Technologies: MATLAB Robotics Toolbox Kinematics Dynamics
Advanced kinematic and dynamic modeling of humanoid robots for motion planning and control. This project involves developing mathematical models for multi-degree-of-freedom humanoid systems, enabling precise motion control and balance maintenance for bipedal locomotion.
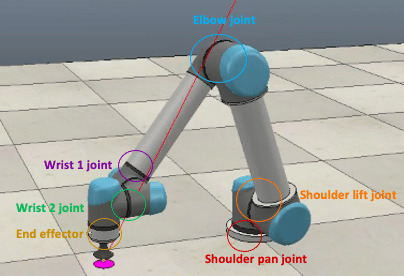
Vision-based UR5 Control
Date: 2023
Technologies: ROS OpenCV UR5 Camera Calibration
Implementation of vision-guided control for UR5 collaborative robot. The system uses computer vision to detect and track objects, enabling the robot to perform pick-and-place operations with high precision. Features include real-time object detection, pose estimation, and adaptive motion planning.

Quadruped Navigation
Date: 2022
Technologies: ROS SLAM Navigation Stack Gazebo
Development of autonomous navigation system for quadruped robots in complex environments. The project implements SLAM algorithms, path planning, and obstacle avoidance capabilities, enabling the robot to navigate through challenging terrains while maintaining stability and efficiency.

Autonomous Mini-Helicopter
Date: 2021
Technologies: Flight Control IMU GPS PID Control
Design and development of an autonomous mini-helicopter with advanced flight control systems. The project includes flight controller design, sensor fusion for attitude estimation, and implementation of autonomous flight modes including waypoint navigation and hover control.

Quadcopter Trajectory Tracking
Date: 2023
Technologies: Control Theory MATLAB/Simulink Trajectory Planning
Advanced trajectory tracking control system for quadcopter drones. This project implements sophisticated control algorithms for precise trajectory following, including nonlinear control techniques, disturbance rejection, and real-time trajectory optimization for dynamic flight maneuvers.

P3DX Control and Mapping
Date: 2022
Technologies: ROS LIDAR Mapping Localization
Implementation of simultaneous localization and mapping (SLAM) for Pioneer P3DX mobile robot. The system creates detailed maps of indoor environments while tracking the robot's position, enabling autonomous navigation and exploration in unknown environments with high accuracy.

Gait Planning of Quadruped
Date: 2023
Technologies: Gait Planning Simulation Biomechanics Control Systems
Research and development of advanced gait planning algorithms for quadruped robots. The project focuses on optimizing locomotion patterns for different terrains and speeds, implementing bio-inspired gaits, and ensuring stability and energy efficiency during dynamic walking and running motions.